

Introduction
The MODIS Level 1B (L1B) algorithm performs radiometric calibration of data from the MODIS sensors on the EOS-Terra and EOS-Aqua satellites. This calibration is performed on a pixel-by-pixel basis for each of the MODIS’ 36 spectral bands. Input to L1B is the Level 1A (L1A) and geolocation data. L1A includes the raw digital counts from the sensor and telemetry data for each Earth-view pixel. Sensor calibration and characterization parameters are located in 97 look-up tables (LUTs) which are updated as required. A simplified flow diagram for the L1B algorithm is shown in Figure 1.
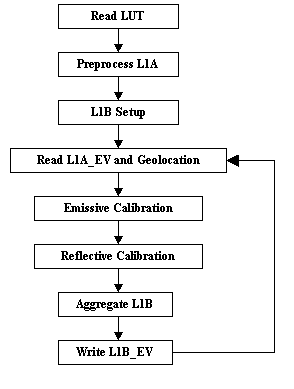
Figure 1. MODIS Level 1B Algorithm
The Earth-view portion of a scan from one side of the MODIS double-sided scan mirror sweeps out an area 10 pixels along- track by 1354 pixels (or frames) cross-track. At nadir, these pixels are 1X1 kilometer. A pixel advance (1 km) cross-track is a frame. A frame includes 10 pixels (along-track) from each of the 36 bands. Each pixel of the two 250 meter bands has 16 sub-frames (digital samples) and each pixel of the five 500 meter bands has 4 sub-frames. In addition, Bands 13 and 14 output both high- and low-gain values. Each frame therefore consists of 830 digital numbers (DNs). Each value is indexed by band, detector, sub-frame and mirror-side (BDSM) and each is calibrated independently.
The L1B software is divided into two major modules. One applies the radiometric calibration and develops uncertainty indices for the 20 Reflective Solar Bands (RSBs) (Bands 1-19 and 26) and the second does the same for the 16 Thermal Emissive Bands (TEBs) (Bands 20-25 and 27-36). The radiometric calibration and uncertainty procedures are described in the following sections.
At any given time, there are two current versions of the L1B software and the numerous LUTs in order to accommodate minor differences in the Terra and Aqua sensors. Changes in both sets of software and updates of the LUTs are carefully tracked and archived so as to enable data reprocessing.
Uncertainty Index
For each pixel, the Uncertainty Index (UI), with a range of 0-15, is computed online using the following:
UI = scaling_factor[B]•ln(sEV/specified_uncertainty[B])
The band dependent scaling factors and specified uncertainty values come from LUT inputs. The RSS uncertainty, sEV (in percent), is computed dynamically.
UI utilizes the first four bits of an 8-bit unsigned integer, which yields a range of 0-15.
Scaled Integer Conversion
The TEB radiance values, LEV (W/m2/µm/sr), are scaled to an integer range of 0-32767 over the LUT-supplied dynamic range of Lmin to Lmax using:
SI(BDF)=32767*(LEV(BDF)- Lmin(BDF))/(Lmax(B)- Lmin(B))
LEV (a 32-bit floating-point number) is scaled to a valid integer of 0 to 32767, using 15 bits of a 16-bit integer number. SIs greater than 32767 are reserved for invalid data.
The LUT-fuished values of Lmin and Lmax are indexed by band only.
The RSB reflectance factors are scaled in a similar manner.
Data Events
Occasionally the MODIS L1B data undergoes a change in character or is interrupted (i.e. unavailable) for some period. Changes in the data are typically caused by either a change in the operational configuration of the sensor or modifications to the L1B processing. Configuration changes to establish the "best" operational mode were frequent for the Terra MODIS in the period from February 2001 to October 31, 2001. The occasional changes after November 1, 2001 were to address sensor malfunctions. Processing changes entail modifications to both the software and LUTs to accommodate newly discovered features of the sensor (i.e., time dependent degradation and crosstalk corrections). These changes typically affect only a few bands and may not be visible to a particular user. Interruptions in the data flow occur when there are malfunctions in either the spacecraft or sensor and occasionally when there is an orbit adjustment. These losses of data can extend from minutes to several days or weeks.